Mostní model nosného aparátu
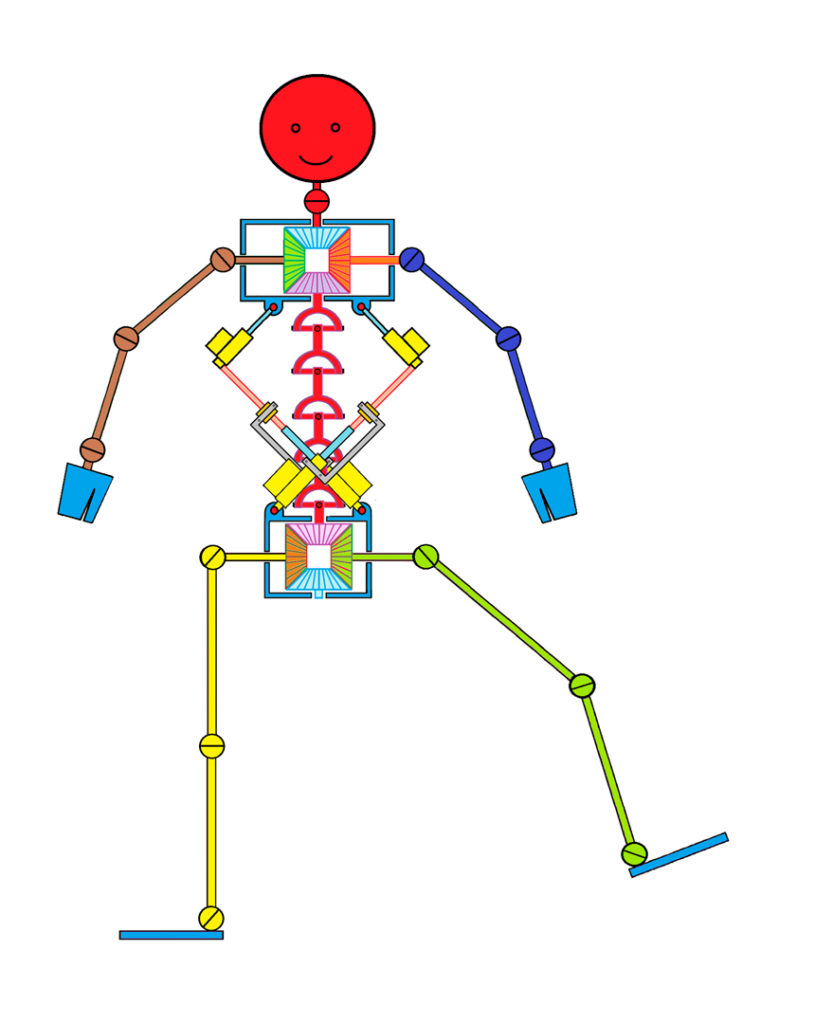
To podstatné, co se z hlediska pohybu lidského těla při lokomoci děje, můžeme pozorovat na osovém orgánu. Jedná se o pohybovou souhru mezi pletencem pánevním a hrudním košem s lopatkami.
Biomechanika lokomoční motoriky pohybového aparátu člověka vykazuje zjevné podobnosti s mostní architektonikou. Pro přesun těla po čtyřech nebo dvou končetinách je nezbytné, aby byly nejprve vytvořeny podmínky pro přesun těžiště těla. To může být v gravitačním poli přesouváno jedině tak, že bude vyneseno mimo opěrnou bázi či opěrné body. K tomuto vynesení slouží u savců končetiny, převážně všechny čtyři, vzácně u lidoopů jsou užívány končetiny dvě.
-
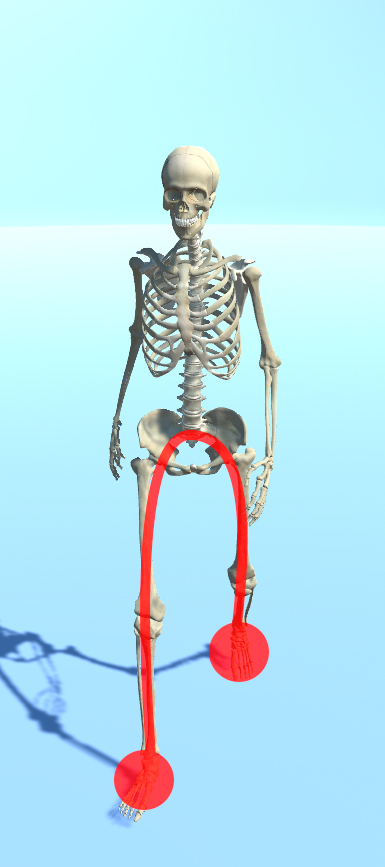
Vyobrazení opěrných bodů a nosného oblouku v chůzi
-
Vyobrazení opěrných bodů a nosného oblouku v chůzi
Biomechanická konstrukce lidského těla, která umožňuje vzpřímenou chůzi po dvou končetinách, je modelem nejnáročnějšího typu lokomoce ze všech dosud známých. Chůze po dvou končetinách je výhodná z celé řady důvodů. Z hlediska ekonomické náročnosti je nejvýhodnější, protože používá kinetické energie kmitu kročné dolní končetiny, a stejně tak i kmitu „virtuálně“ kročné horní končetiny k „tahu“ těžiště těla vpřed. Velmi snadno umožňuje měnit rychlost a směr pohybu. Umožňuje pohyb po nejrůznějším typu terénu, včetně zvládání změn terénního sklonu. Vzpřímená chůze také zlepšuje podmínky pro optickou a akustickou orientaci.
-
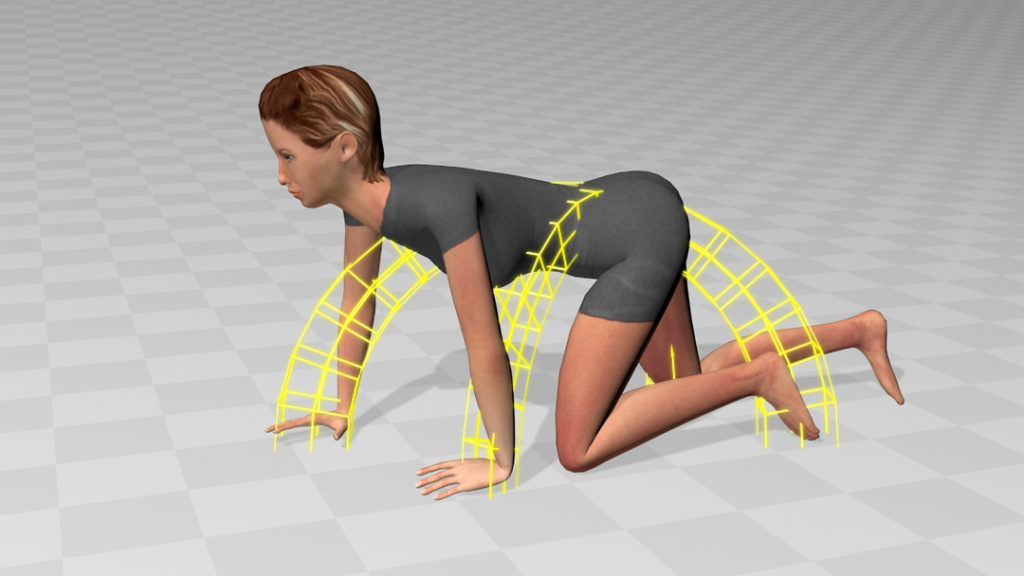
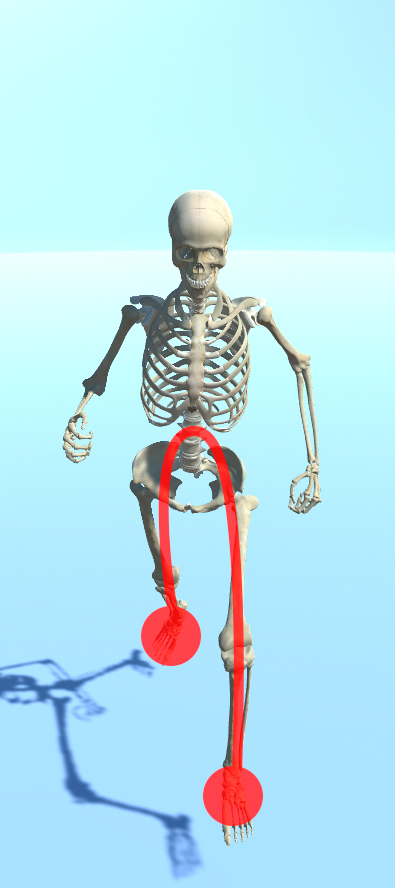
Vyobrazení změn konstrukce „mostního oblouku“ a jeho změn při pohybu
-
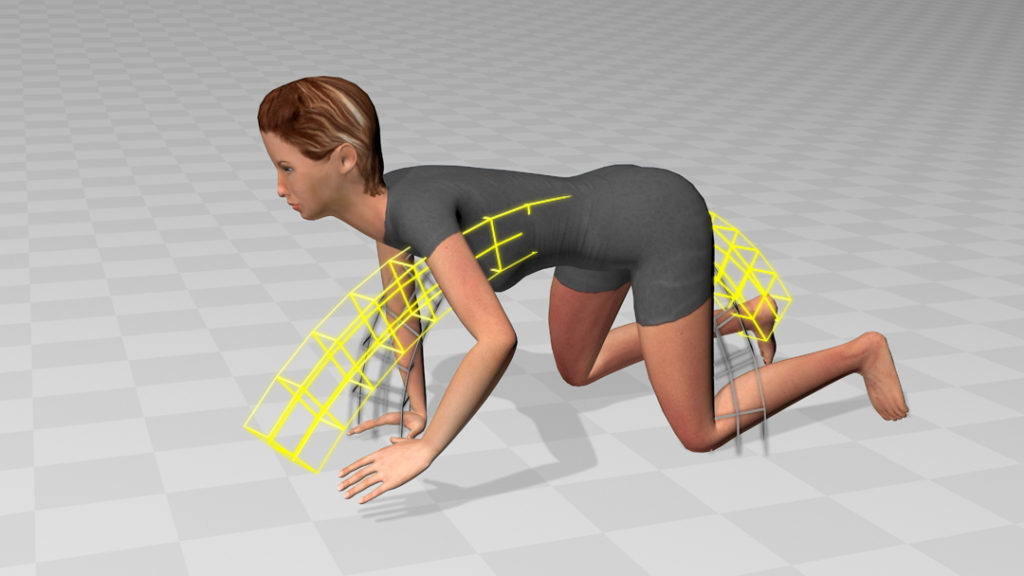
Vyobrazení změn konstrukce „mostního oblouku“ a jeho změn při pohybu
-
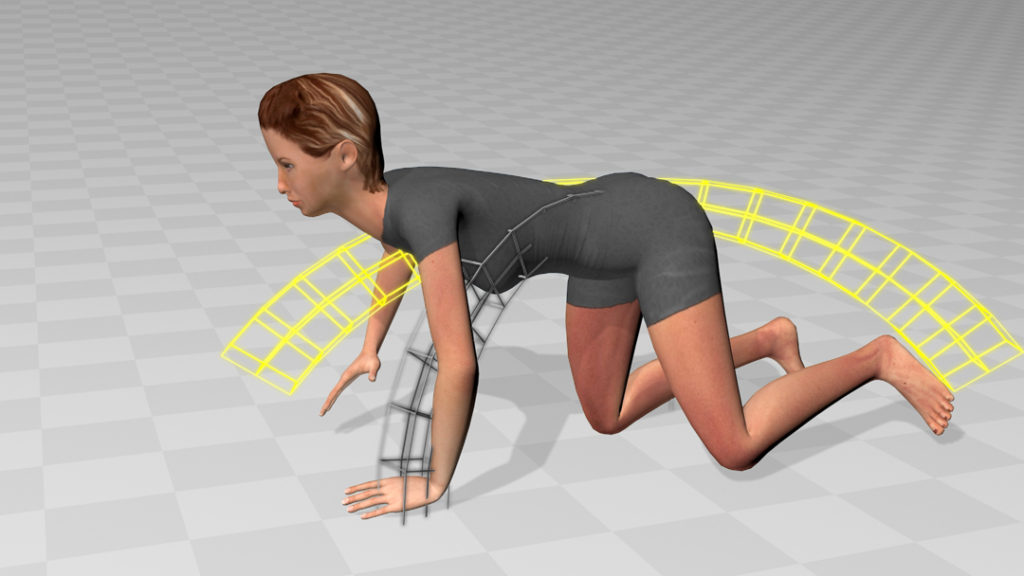
Vyobrazení změn konstrukce „mostního oblouku“ a jeho změn při pohybu
Na druhou stranu s sebou vzpřímená chůze nese řadu nevýhod a komplikací. Znamená náročné podmínky pro hydrodynamiku krevního a lymfatického oběhu; pro návrat venózní krve a lymfy z dolních končetin musely být vyvinuty pomocné cévní chlopně. Při jejich insuficienci trpí akrální části nohou otoky. Zatěžování nosných kloubů dolních končetin je vystaveno extrémní námaze, která se přenáší na relativně nevelké plochy kloubních chrupavek kyčelních, kolenních a hlezenních kloubů. Ty bývají zdrojem řady patologických změn s následnými dopady na biomechaniku chůze a držení těla.
Délka dlouhých kostí, nezbytná pro dostatečnou délku kroku, aby mohla být lokomoce vůbec ekonomická, zapříčiňuje jejich náchylnost k frakturám. Také vertikální postavení pánve je pro nesení bederních obratlů velice zatěžující a jejich přetěžování je častým zdrojem poruch páteře.
Z hlediska svalového jsou dolní končetiny vybaveny největšími svalovými partiemi, které jsou také energeticky nejnáročnější. Nervové zásobení velkých svalových partií vyžaduje silná nervová vlákna a široké pleteně nervových větvení, a ty jsou častým zdrojem poškození spojených s poruchami lokomoce.
Složité kolenní klouby jsou náchylné k poškození měkkých i pevných struktur. O něco odolnější jsou hlezenní klouby, ale klouby kyčelní jsou opět náchylné k degenerativním změnám.
Z hlediska řízení pohybu je vzpřímená chůze náročná a vykazuje značnou fragilitu. Pro bezchybnou chůzi je nezbytné, aby byla sladěna celá řada komponent. Jednou z nich je automatika držení těla, která ve stoji vykazuje za fyziologických podmínek tyto znaky: frontální osa těla jde v ideální středové čáře, stejně tak osa sagitální v bočním pohledu prochází bodem zevního zvukovodu, středem ramenního kloubu, středem kloubu kyčelního, kolenního a středem hlezního kloubu.
Další podmínkou normální chůze jsou vyladěné vzpřimovací a rovnovážné reflexy. Důležitým předpokladem je v průběhu prvního roku správně spuštěný stereotyp chůzového automatismu.
Chůze, stejně jako automatické držení těla, patří mezi mechanismy, které jsou řízeny zcela automaticky z nevědomých struktur CNS a možnost jejich vědomého ovlivňování je spíše iluzorní. Prakticky je vědomé řízení chůze a vědomé řízení našeho držení těla možné jen po dobu několika desítek sekund, pak opětovně „spadneme“ do své nevědomé automatiky řízení.
Animace – Překulení
Animace – Schéma mostní konstrukce
Právě poruchy řízení automatiky držení těla a poruchy řízení automatického kročného mechanismu jsou zodpovědné za převážnou část funkčních poruch pohybového aparátu. Ukazuje se, že snaha posílit pohybový aparát posilovacími technikami, které vycházejí z konceptu 2D anatomie, se nejen míjí očekávaným ú
inkem, ale celou situaci většinou ještě zhoršují. Často se zvětšují a prohlubují existující svalové dysbalance, a tím se zhoršují podmínky pro fungování již narušených stereotypů. Výsledkem jsou parciálně posílené svalové skupiny, které ale v rámci pohybových stereotypů a řízení automatiky držení těla jsou spíše na překážku než k užitku.
Příkladem může být srovnávací pokus nesení břemen, kdy jednu skupinu tvořili dobře vycvičení a trénovaní vojáci amerického námořnictva a druhou skupinu nepálští Šerpové a ženy saharské Afriky. Skupina vojáků nesla zátěž padesát kilogramů v krosnách speciálně šitých pro ženijní vojsko. Druhá skupina nesla stejnou zátěž v rancích, které byly jedním popruhem vedeny přes čelo nebo přes vrchní část hrudníku, obutí byli většinou v jednoduchých sandálech. Tato druhá skupina nebyla trénovaná v posilovnách a svalové vybavení jejích členů bylo spíše průměrné. Výsledkem bylo, že po prvním dni byla řada vojáků z první skupiny na pokraji fyzických sil, zatímco členové druhé skupiny ještě připravovali jídlo na pochod druhého dne tak, jak je jejich zvykem. Po druhém a třetím dni většina amerických vojáků pro totální vyčerpání pochod ukončila. Z druhé skupiny došli všichni bez výrazných známek vyčerpání. Z vyhodnocení kinematického záznamu způsobu pochodu vojáků bylo zřejmé, že způsob jejich chůze s břemenem je velice neefektivní a břemeno je výrazně brzdí. Naopak výsledky kinematického rozboru chůze Šerpů a Afričanek ukázala, že nesené břemeno jim svou kinetickou energií napomáhá v chůzi.
Biomechanická konstrukce pohybového aparátu
Vznik a průběh pohybu
Analyzujeme-li pohybové vzorce, díky nimž se člověk může pohybovat z místa, a cílené pohyby, například úchop, pak se velmi rychle nabízí otázka: kdy vlastně můžeme hovořit o pohybu z místa? Odpověď zní: když je tělo schopno se pomocí své motoriky posunout z bodu A do bodu B. Mezi body A a B je cesta, která bude zdolána.
Zpravidla člověk při pohybu z místa myslí na chůzi, běh, plazení nebo skákání na dvou či čtyřech končetinách. Pozorovatel přitom zaznamenává převážně velké a rychlé pohyby. Ovšem ty jsou pouze dobře viditelným výsledkem, nejsou však podstatou pohybu.
Při rozboru chůzového mechanismu se na počátku kroku objeví zcela nepatrný pohyb v oblasti páteře, který umožňuje přenesení těžiště těla a následnou změnu v odpovídajícím držení. Tento pohyb páteře se skládá z mnoha jednotlivých pohybů obratlů. Tyto pohyby jsou velmi malé a pomalé a snadno uniknou pozornosti. Takto nahlíženy jsou tyto malé a nepatrné posuvné a rotační pohyby páteře již samy pohybem z místa, neboť tyto nepatrné třídimenzionální pohyby obratlů uskutečňují určitou „cestu“, trajektorii.
Animace – Zjednodušená biomechanika lidského těla
Pohyby jednotlivých obratlů mezi sebou stojí v přímém proměnlivém vztahu a v závislosti k pohybu končetin, neboť skrze volný pohyb páteře je teprve umožněn plný pohyb ramenních a kyčelních kloubů.
Pohyb vývojově začíná pohyby, které se dějí mezi pletencem pánevním a hrudním košem v poloze na zádech u dítěte ve třetím měsíci po narození.